Analyzing the Feasibility of an Unmanned Cargo Ship for Different Operational Phases
| dc.contributor.author | Bellingmo, Pauline Røstum | |
| dc.contributor.author | Wille, Egil | |
| dc.contributor.author | Nordahl, Håvard | |
| dc.contributor.author | Mørkrid, Odd Erik | |
| dc.contributor.author | Holte, Even Ambros | |
| dc.date.accessioned | 2023-12-20T10:04:18Z | |
| dc.date.available | 2023-12-20T10:04:18Z | |
| dc.date.created | 2023-08-21T12:40:35Z | |
| dc.date.issued | 2023 | |
| dc.identifier.citation | TransNav, International Journal on Marine Navigation and Safety of Sea Transportation. 2023, 17 (2), 397-404. | en_US |
| dc.identifier.issn | 2083-6473 | |
| dc.identifier.uri | https://hdl.handle.net/11250/3108354 | |
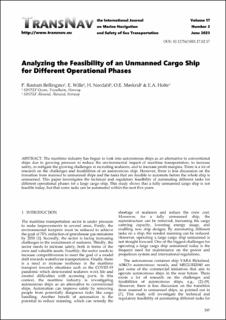
| dc.description.abstract | The maritime industry has begun to look into autonomous ships as an alternative to conventional ships due to growing pressure to reduce the environmental impact of maritime transportation, to increase safety, to mitigate the growing challenges in recruiting seafarers, and to increase profit margins. There is a lot of research on the challenges and feasibilities of an autonomous ship. However, there is less discussion on the transition from manned to unmanned ships and the tasks that are feasible to automate before the whole ship is unmanned. This paper investigates the technical and regulatory feasibility of automating different tasks for different operational phases for a large cargo ship. This study shows that a fully unmanned cargo ship is not feasible today, but that some tasks can be automated within the next five years. | en_US |
| dc.language.iso | eng | en_US |
| dc.rights | Navngivelse-Ikkekommersiell 4.0 Internasjonal | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc/4.0/deed.no | * |
| dc.title | Analyzing the Feasibility of an Unmanned Cargo Ship for Different Operational Phases | en_US |
| dc.title.alternative | Analyzing the Feasibility of an Unmanned Cargo Ship for Different Operational Phases | en_US |
| dc.type | Peer reviewed | en_US |
| dc.type | Journal article | en_US |
| dc.description.version | publishedVersion | en_US |
| dc.rights.holder | Published by Gdynia Maritime University, Poland. Distributed under the terms of the Creative Commons Attribution License (CC BY-NC). | en_US |
| dc.source.pagenumber | 397-404 | en_US |
| dc.source.volume | 17 | en_US |
| dc.source.journal | TransNav, International Journal on Marine Navigation and Safety of Sea Transportation | en_US |
| dc.source.issue | 2 | en_US |
| dc.identifier.doi | 10.12716/1001.17.02.17 | |
| dc.identifier.cristin | 2168422 | |
| dc.relation.project | Norges forskningsråd: 309230 | en_US |
| dc.relation.project | EC/H2020/815012 | en_US |
| cristin.ispublished | true | |
| cristin.fulltext | original | |
| cristin.qualitycode | 1 |
Tilhørende fil(er)
Denne innførselen finnes i følgende samling(er)
-
Publikasjoner fra CRIStin - SINTEF Ocean [1369]
-
SINTEF Konsernstab [47]
-
SINTEF Ocean [1443]

Med mindre annet er angitt, så er denne innførselen lisensiert som Navngivelse-Ikkekommersiell 4.0 Internasjonal