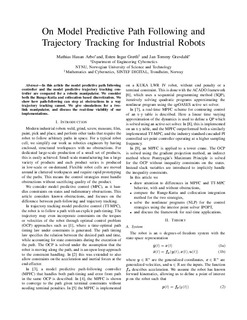
On Model Predictive Path Following and Trajectory Tracking for Industrial Robots
Journal article, Peer reviewed
Accepted version
View/
Date
2017Metadata
Show full item recordCollections
- Publikasjoner fra CRIStin - SINTEF AS [5801]
- SINTEF Digital [2501]
Original version
IEEE International Conference on Automation Science and Engineering, 2017, pp 6Abstract
In this article the model predictive path following controller and the model predictive trajectory tracking con-troller are compared for a robotic manipulator. We consider both the Runge-Kutta and collocation based discretization. We show how path-following can stop at obstructions in a way trajectory tracking cannot. We give simulations for a two-link manipulator, and discuss the real-time viability of our implementations.